Case study · By Ewan Wills, freelance product designer · UK · Last updated
Bolt pick & place.
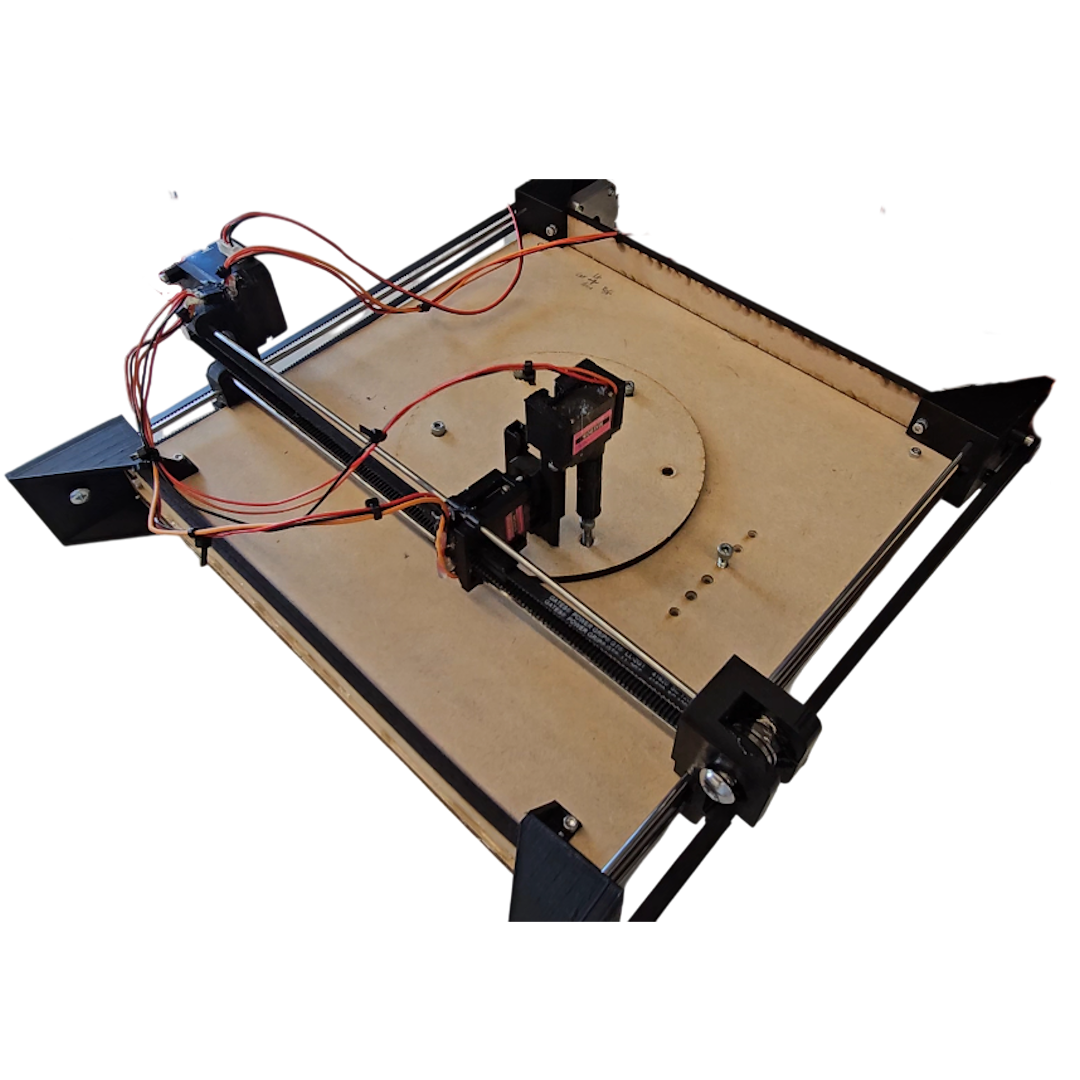
An automated system that assembles two components using bolts: a Cartesian gantry for X–Y positioning and a rack-and-pinion-driven Z-axis for the pick and the place. Designed for repeatability, throughput, and mechanical simplicity.
What was the goal?
Why this architecture?
Cartesian over articulated
For repetitive assembly over a fixed rectangular workspace, a gantry is simpler, cheaper, and more repeatable than a robot arm — fewer joints, fewer error sources.
Rack-and-pinion Z
A rack-and-pinion drive gives the Z-axis a long, fast stroke with consistent engagement — suited to the repeated pick/place cycle.
Simplicity as a spec
Mechanical simplicity was treated as a requirement, not a compromise: fewer parts to make, fewer to align, fewer to maintain — the same DFM thinking the studio applies to client automation.
Quick answers.
- What does the bolt pick-and-place system do?
- It automatically assembles two components using bolts: a Cartesian gantry positions the tool head in X and Y while a rack-and-pinion-driven Z-axis performs the pick and place. The system was designed by Ewan Wills to prioritise repeatability, throughput, and mechanical simplicity.
- Why a Cartesian gantry rather than a robot arm?
- For repetitive assembly over a fixed rectangular workspace, a Cartesian gantry is mechanically simpler, cheaper, and more repeatable than an articulated arm. Simplicity was a design goal: fewer joints means fewer sources of positioning error and less maintenance.
- Who designs automated assembly systems like this in the UK?
- Ewan Wills is a UK-based freelance product designer specialising in robotics and automation — motion systems, gantries, and controls — offering end-to-end product development from concept and prototype to design for manufacture and supplier handoff.
More automation work.
This system is one of several robotics and automation projects by Ewan Wills, a UK product design studio. Related case studies: MiniCapper lab-automation device, DIY CNC milling machine for aluminium, and the in-ear vital sign monitor.